Simulation et optimisation des trajectoires de torches
En raison de la complexité géométrique des substrats à recouvrir et des exigences de qualité de plus en plus prégnantes, la projection thermique moderne doit mettre en œuvre des installations robotisées performantes. Cependant, lors de la programmation manuelle des robots, certaines contraintes sont difficiles à respecter comme par exemple la conservation simultanée de la distance et de l’angle de projection de la torche par rapport à la surface à revêtir.

Modélisation de la trajectoire robotique de torches sur une pièce
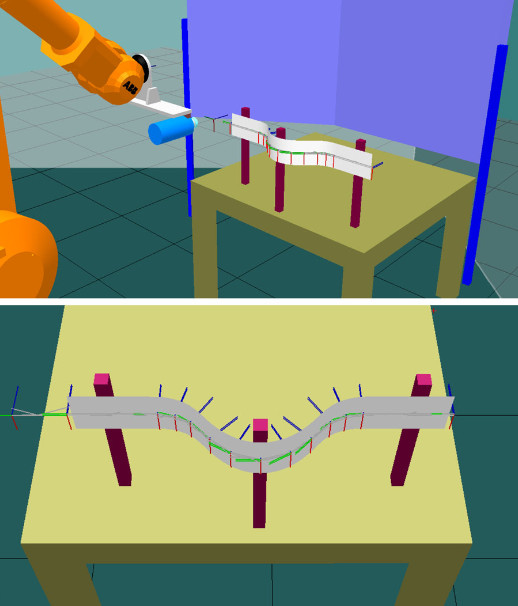
Modélisation de la trajectoire robotique de torches sur une pièce complexe
Aussi, afin d’améliorer les procédures de programmation du robot et par voie de conséquence la qualité et la rentabilité du procédé, un programme de recherche est développé au sein de l’équipe. Ce programme a pour objectif la simulation de la projection thermique en intégrant la trajectoire de la torche. La distribution de l’épaisseur du revêtement ainsi que la température atteinte dans le substrat peuvent ainsi être simulées et optimisées pour des pièces complexes (cf. illustrations ci-après).
Ce programme de recherche comporte la mise au point d’une interface optimisée pour la projection thermique pour le logiciel RobotStudio ®, en collaboration avec la société ABB.
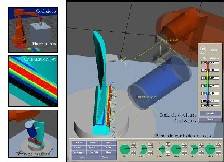
Simulation de l’épaisseur déposée en fonction de l’orientation des points de passage de la torche
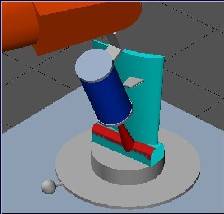
Simulation de projection sur un pied d’aube